
Efficient development of multi-sensor applications
For the development of algorithms for ADAS and automated driving, version 2.0 of the vADASdeveloper software tool offers comprehensive support. It offers ADAS developers a complete solution, ranging from multi-sensor data recording to quick visualisation of results. Even algorithm development along with implementation in simulation and testing systems can be realised in this way.
With this version, the vADASdeveloper application combines signal-oriented automotive measuring technology with object-orientated data fusion development. Access to network signals by CAN, LIN, FlexRay and Ethernet/BroadR-Reach is now completely by means of Vector bus interfaces. Here, input data objects for data fusion can be conveniently configured graphically from individual signals.
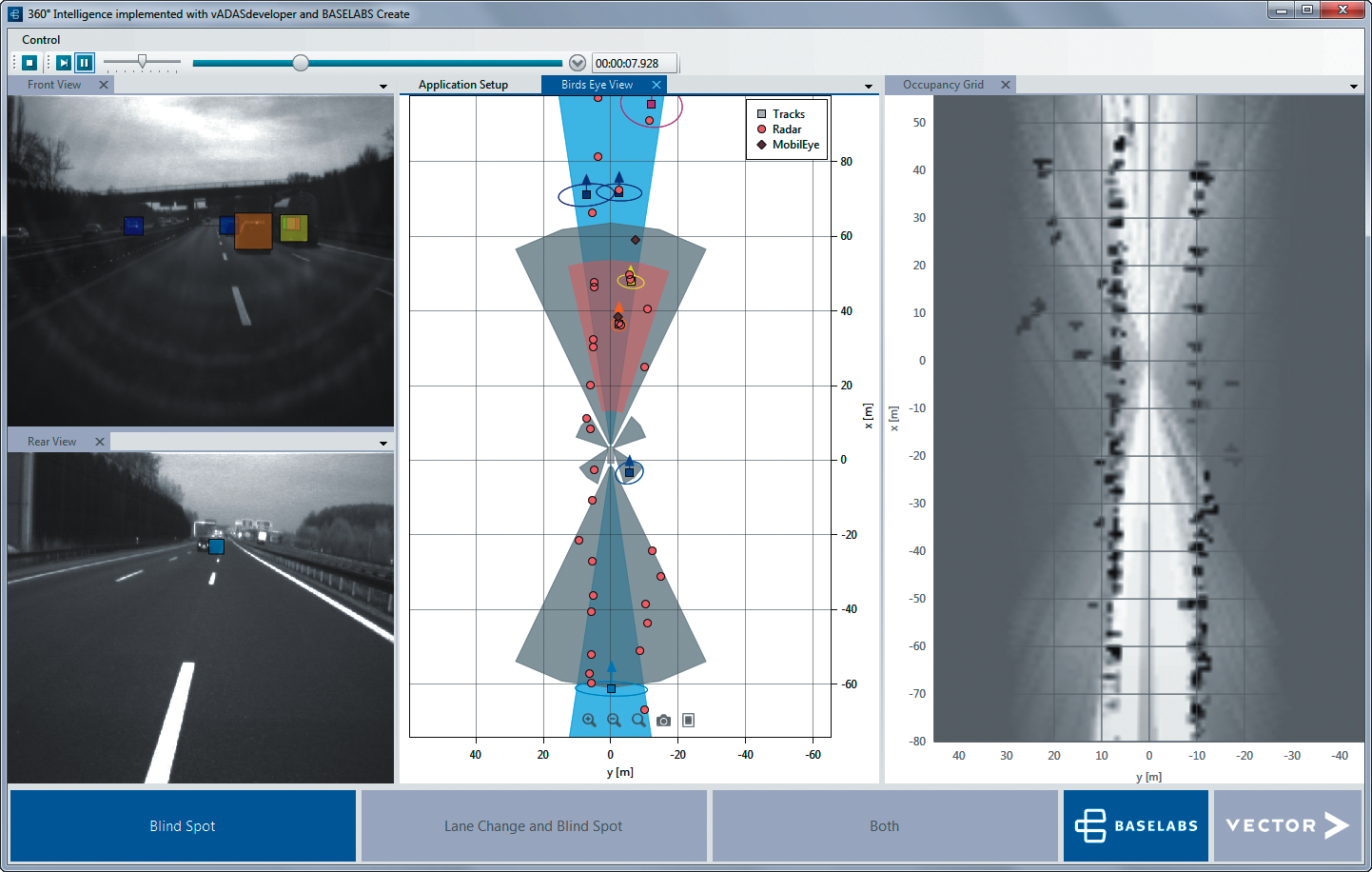
Figure 1 - Visualisation that can be adapted to any application, both for scenarios with moving objects such as highway assist or lane change assist with blind-spot monitoring and for scenarios with mostly static objects/obstacles like in automated parking.
Real-time access of ECU internal data is supported via the XCP protocol and can be enhanced with the VX1000 measurement and calibration hardware. All input signals can be timestamped consistently and precisely using the XCP 1.3 protocol and Vector hardware synchronisation.
An additional new feature enables the playback of previously recorded data in MDF format as well as videos in AVI format. In this way, the ADAS developer can now use vehicle data recorded in CANape or other measuring tools for algorithm development.
Typical sensors (such as cameras, radar, LiDAR etc.) can be integrated easily and also linked graphically. All sensor data as well as algorithm results are presented by vADASdeveloper with a clear overview, not only from a bird's eye view but also as an object overlay in the reference video image. Individually adapted visualisations may also added by the user by means of WinForms or WPF.
For development of the surrounding environment model, the Create software library is available as a result of the partnership with BASELABS. With its pre-implemented data fusion algorithms as well as system and sensor models, this library makes it much easier to run the work process up to functional prototypes. Simulink models that already exist, e.g. for driving functions, can be executed directly and simply within the vADASdeveloper application via the DLL /C# Wrapper Generator supplied.
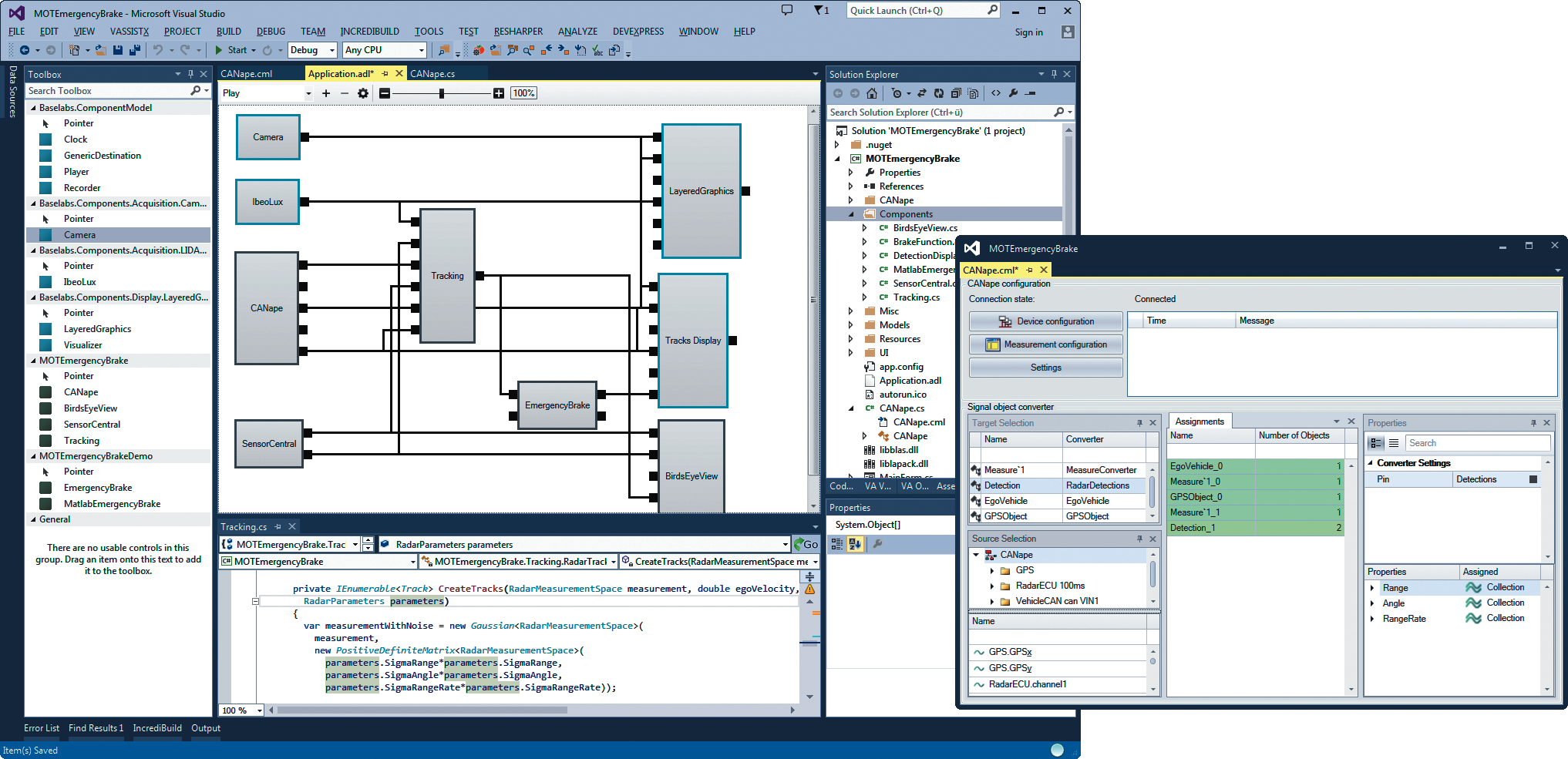
Figure 2 - Efficient implementation, debugging and testing of multi-sensor applications with vADASdeveloper 2.0: Easy graphic configuration of input data objects from individual signals (from DBC/A2L/LDF/FIBEX/ARXML databases).
By using vADASdeveloper, the user has a complete infrastructure at his disposal and can concentrate fully on algorithm development.

Featured products

MAX17793
Analog Devices Inc.

3V to 80V, 3A, High-Efficiency, Synchronous Step-Down DC-DC Converter
| SKU: | MAX17793 |
|---|---|
| Stock: | 9316 |
| Cost: | $3.64 |

MAX22516
Analog Devices Inc.

IO-Link Data Link Controller with Transceiver and Integrated DC-DC
| SKU: | MAX22516 |
|---|---|
| Stock: | 8000 |
| Cost: | $5.42 |