
Visual translation in real-time from Google Translate
The Google Translate app now does real-time visual translation of 20 more languages. So the next time you’re in Prague and can’t read a menu, we’ve got your back. But how are we able to recognise these new languages? In short: deep neural nets. When the Word Lens team joined Google, we were excited for the opportunity to work with some of the leading researchers in deep learning.
Author: Otavio Good, Software Engineer, Google Translate
Neural nets have gotten a lot of attention in the last few years because they’ve set all kinds of records in image recognition. Five years ago, if you gave a computer an image of a cat or a dog, it had trouble telling which was which. Thanks to convolutional neural networks, not only can computers tell the difference between cats and dogs, they can even recognise different breeds of dogs. Yes, they’re good for more than just trippy art—if you’re translating a foreign menu or sign with the latest version of Google’s Translate app, you’re now using a deep neural net. And the amazing part is it can all work on your phone, without an Internet connection. Here’s how.
Step by step
First, when a camera image comes in, the Google Translate app has to find the letters in the picture. It needs to weed out background objects like trees or cars, and pick up on the words we want translated. It looks at blobs of pixels that have similar colour to each other that are also near other similar blobs of pixels. Those are possibly letters, and if they’re near each other, that makes a continuous line we should read.
Second, Translate has to recognise what each letter actually is. This is where deep learning comes in. We use a convolutional neural network, training it on letters and non-letters so it can learn what different letters look like.
But interestingly, if we train just on very “clean”-looking letters, we risk not understanding what real-life letters look like. Letters out in the real world are marred by reflections, dirt, smudges, and all kinds of weirdness. So we built our letter generator to create all kinds of fake “dirt” to convincingly mimic the noisiness of the real world—fake reflections, fake smudges, fake weirdness all around.
Why not just train on real-life photos of letters? Well, it’s tough to find enough examples in all the languages we need, and it’s harder to maintain the fine control over what examples we use when we’re aiming to train a really efficient, compact neural network. So it’s more effective to simulate the dirt.

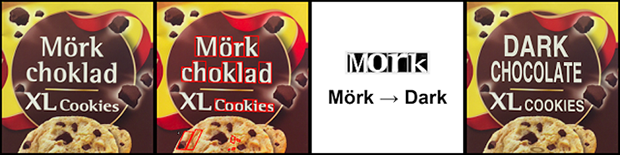
The third step is to take those recognised letters, and look them up in a dictionary to get translations. Since every previous step could have failed in some way, the dictionary lookup needs to be approximate. That way, if we read an ‘S’ as a ‘5’, we’ll still be able to find the word ‘5uper’. Finally, we render the translation on top of the original words in the same style as the original. We can do this because we’ve already found and read the letters in the image, so we know exactly where they are. We can look at the colors surrounding the letters and use that to erase the original letters. And then we can draw the translation on top using the original foreground colour.
Crunching it down for mobile
Now, if we could do this visual translation in our data centres, it wouldn’t be too hard. But a lot of our users, especially those getting online for the very first time, have slow or intermittent network connections and smartphones starved for computing power. These low-end phones can be about 50 times slower than a good laptop—and a good laptop is already much slower than the data centers that typically run our image recognition systems. So how do we get visual translation on these phones, with no connection to the cloud, translating in real-time as the camera moves around?
We needed to develop a very small neural net, and put severe limits on how much we tried to teach it—in essence, put an upper bound on the density of information it handles. The challenge here was in creating the most effective training data. Since we’re generating our own training data, we put a lot of effort into including just the right data and nothing more. For instance, we want to be able to recognise a letter with a small amount of rotation, but not too much. If we overdo the rotation, the neural network will use too much of its information density on unimportant things. So we put effort into making tools that would give us a fast iteration time and good visualisations. Inside of a few minutes, we can change the algorithms for generating training data, generate it, retrain, and visualise. From there we can look at what kind of letters are failing and why. At one point, we were warping our training data too much, and ‘$’ started to be recognised as ‘S’. We were able to quickly identify that and adjust the warping parameters to fix the problem. It was like trying to paint a picture of letters that you’d see in real life with all their imperfections painted just perfectly.
To achieve real-time, we also heavily optimised and hand-tuned the math operations. That meant using the mobile processor’s SIMD instructions and tuning things like matrix multiplies to fit processing into all levels of cache memory.
In the end, we were able to get our networks to give us significantly better results while running about as fast as our old system—great for translating what you see around you on the fly. Sometimes new technology can seem very abstract, and it’s not always obvious what the applications for things like convolutional neural nets could be. We think breaking down language barriers is one great use.

Featured products

MAX17793
Analog Devices Inc.

3V to 80V, 3A, High-Efficiency, Synchronous Step-Down DC-DC Converter
| SKU: | MAX17793 |
|---|---|
| Stock: | 9316 |
| Cost: | $3.64 |

MAX22516
Analog Devices Inc.

IO-Link Data Link Controller with Transceiver and Integrated DC-DC
| SKU: | MAX22516 |
|---|---|
| Stock: | 8000 |
| Cost: | $5.42 |
Product Spotlight
102991834
BeagleBoard

Single Board Computer (SBC), BeagleY-AI
AM67A BeagleY-AI Jacinto 7 AR...
| SKU: | 2820-102991834-ND |
|---|---|
| Stock: | 177 |
| Cost: | $56.92 |
SC1110
Raspberry Pi

Raspberry Pi 5 2GB
The Raspberry Pi 5 2GB model represents a leap for...
| SKU: | 2648-SC1110-ND |
|---|---|
| Stock: | 185 |
| Cost: | $38.33 |
AKX00069
Arduino

Arduino Plug and Make Kit
The Arduino Plug and Make Kit features the ...
| SKU: | |
|---|---|
| Stock: | 892 |
| Cost: | $66.97 |
300361-0011
Molex

MX150 Mid-Voltage MatSealed Female Connector Assembly, Dual Row, 20 Circ...
| SKU: | |
|---|---|
| Stock: | 280 |
| Cost: | $2.51 |