
USB 3.0 stereo vision camera supports stereo WVGA at 60fps
The launch of Tara, a USB 3.0 Stereo vision camera has been announced by e-con Systems. Tara is based on the 1/3-inch MT9V024, a WVGA Global shutter monochrome CMOS image sensor from OnSemi. The Tara supports Stereo WVGA (1504x480) at 60fps over USB 3.0 in uncompressed format.
This Stereo vision camera provides synchronised sensor frames to the host machine over USB 3.0 interface.
Tara is bundled with a Software Development Kit (SDK) with full source code for application development on top of OpenCV, enabling customers to develop their own Stereo Vision Camera based applications. e-con Systems also provides sample applications with source code, demonstrating synchronous stereo image capture, depth measurement, disparity map and point cloud. In addition to this, customers can also develop their Stereo Vision Camera algorithms on top of Tara SDK or integrate Tara directly in their product design.
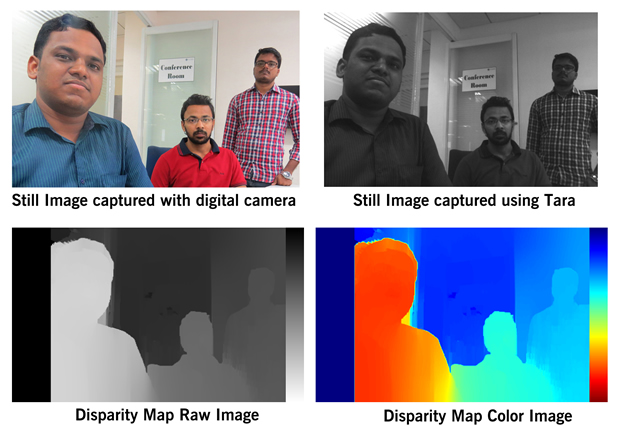
Image: Tara Disparity Map sample
“I am excited with the launch of our first USB 3.0 Stereo Vision camera marking a beginning of a new camera product line for variety of applications in machine vision, autonomous driving, robotics, drones etc. With its integrated IMU, customers can determine the camera position in 3D space which is critical in these applications. e-con provides OpenCV based SDK that generates disparity map and customers can directly use these images in their applications.” said Ashok Babu, President of e-con Systems.
TARA with a form factor 100x30x35mm consists of two OnSemi's 1/3 inch MT9V024 CMOS image sensors separated by an 'inter-ocular distance' or 'base line' of 60mm and pre-calibrated lens pair mounted on S-Mount holder (Also known as M12 lens mount). The MT9V024 enhanced NIR pixel process provides excellent image quality in IR illuminated applications also. With USB 3.0 interface to the host PC, TARA can stream uncompressed Stereo WVGA format (1504*480) or in other words two WVGA (752x480) at 60fps. The other resolutions supported are VGA (cropped) at 60fps and QVGA (640*420) at 60fps. It also has ability to capture still images. The Tara has a 6-axis Inertial Measurement Unit (IMU) and for each frame the IMU data is transferred to the application layer. TARA is a UVC-compliant USB 3.0 Camera that is also backward compatible with USB2.0 host ports and does not require any special camera drivers to be installed in the host PC. The brightness and exposure can be controlled from the application using the standard UVC controls.
Image: Tara - USB 3.0 Stereo Vision Camera with Pre-calibrated Lens
e-con provides a Software Development Kit that is built on OpenCV Image Processing Library that allows customers to get the disparity maps directly in to their application. The image capture, stereo disparity map generation etc, are done inside the SDK and customers can directly get these images in to their application using this SDK. The SDK also provides the left and right camera images separately and the customers can directly use these images for their own stereo image processing.
For customers, who want to implement their own stereo processing algorithms without using the SDK, can grab the stereo images from the camera directly using DirectShow (on Windows) or V4L2 (on Linux) APIs. With this, they can bypass the SDK and get the pixel-interleaved left and right images from the camera directly.
e-con is also providing sample applications with source code to use with other image processing software such as MATLAB. Customers can use this sample application to develop their applications using MATLAB software.
The IMU data is sent over the USB 3.0 interface for every frame. The IMU data can be used to determine the stereo camera position in the 3D space at the time of capturing of any frame. Customers can use this IMU data along with the stereo images.
Tara, with its small form-factor design with USB 3.0 interface and accompanying SDK, is targeted for applications such as obstacle detection in autonomous driving, stock level monitoring in retail store shelves, volume measurements, robotics, proximity warning etc.

Featured products

MAX17793
Analog Devices Inc.

3V to 80V, 3A, High-Efficiency, Synchronous Step-Down DC-DC Converter
| SKU: | MAX17793 |
|---|---|
| Stock: | 9316 |
| Cost: | $3.64 |

MAX22516
Analog Devices Inc.

IO-Link Data Link Controller with Transceiver and Integrated DC-DC
| SKU: | MAX22516 |
|---|---|
| Stock: | 8000 |
| Cost: | $5.42 |
Product Spotlight
102991834
BeagleBoard

Single Board Computer (SBC), BeagleY-AI
AM67A BeagleY-AI Jacinto 7 AR...
| SKU: | 2820-102991834-ND |
|---|---|
| Stock: | 210 |
| Cost: | $56.24 |
SC1110
Raspberry Pi

Raspberry Pi 5 2GB
The Raspberry Pi 5 2GB model represents a leap for...
| SKU: | 2648-SC1110-ND |
|---|---|
| Stock: | 0 |
| Cost: | $38.33 |
AKX00069
Arduino

Arduino Plug and Make Kit
The Arduino Plug and Make Kit features the ...
| SKU: | |
|---|---|
| Stock: | 968 |
| Cost: | $66.97 |
300361-0011
Molex

MX150 Mid-Voltage MatSealed Female Connector Assembly, Dual Row, 20 Circ...
| SKU: | |
|---|---|
| Stock: | 280 |
| Cost: | $2.51 |