
CAD tools used to teach robotics
The online testing and assessment system tool, MapleSim, from Maplesoft is being employed at The University of Manchester where Dr. Joaquin Carrasco, Professor of Control Systems at the University’s School of Electrical and Electronic Engineering, has taught various control systems courses to Master’s students for the past six years.
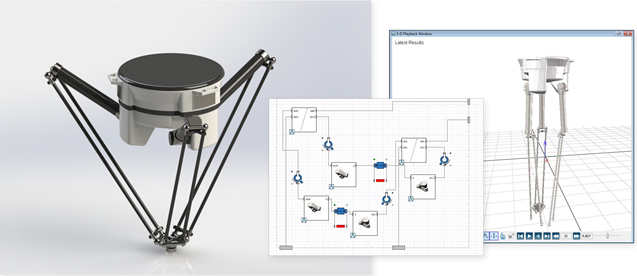
Dr. Carrasco has also recently incorporated Maplesoft’s MapleSim and the MapleSim CAD Toolbox into his Robotics courses. With the MapleSim CAD Toolbox, students can see how their mechanical CAD models behave as part of a larger, multi-domain system.
The students can apply MapleSim's advanced analysis tools to improve their designs. This toolbox makes it easy to import CAD models into MapleSim, automatically capturing the kinematic and dynamic properties of the model components. Using the MapleSim CAD Toolbox, Dr.
Carrasco’s students have modelled several complex devices including a 3D printer, a haptic robotic manipulator and a pick-and-place robot.
In the university’s Bachelor of Engineering in Mechatronic Engineering programme, students learn about the design and implementation of intelligent mechatronic systems. Recently, Dr. Carrasco began teaching Applied Mechanics for Industrial Robotics to second year students taking this programme.
Based on his previous experience with Maplesoft technology, he decided to enhance the Robotics classroom experience with the introduction of MapleSim, which offers students an engineering environment that enables them to develop high fidelity models. According to Dr. Carrasco: “3D visualisation is a priority for my Robotics class and MapleSim is the best 3D visualisation tool available.”
Using MapleSim, students are able to visualise the concepts they are learning. The acausal multi-domain modelling environment of MapleSim provides students with a natural avenue for modelling. MapleSim uses symbolic and numeric computing techniques to yield accurate models that depict the behaviour of the system.
MapleSim’s component libraries allow the students to easily drag and drop ready-made components into the workspace. One way Dr. Carrasco uses MapleSim in the classroom is to provide the students with a MapleSim robotic model and have the students find the equations of motion. MapleSim’s interactive approach allows students to visualise the robot and manipulate the underlying mathematical equations.
Within MapleSim there is a learning module: The Forward Kinematics of Serial Manipulators. Introducing the Denavit-Hartenberg Convention, the focus of the module is to obtain the position and orientation of the end-effector of a robotic manipulator. Useful for calculating the forward and inverse kinematics, the D-H Convention describes the motions of a series of joints (revolute and prismatic) with respect to a reference frame.
Dr. Carrasco noted: “The concept of D-H parameters is very difficult to explain to undergraduate students. Using MapleSim, the mathematics comes alive and the students are able to easily visualise the concept.” Unlike other software packages, learning modules are free with the purchase of MapleSim.
Dr. Carrasco also uses the MapleSim Model Gallery in his Robotics class. The gallery contains many robotics examples demonstrating varying degrees of complexity. The gallery contains models from a Simple Inverse Kinematic Problem to a more advanced model of a KUKA Robot.
This model is based on a robot from KUKA Robotics. In the KUKA robot model from the MapleSim Model Gallery, the robot mimics the handwriting of any word the user selects.
The example in the Model Gallery shows the robot writing the word Maple. Using the existing model, Dr. Carrasco asks the students to program the robot to write their own names. The students can use parameter sweeps to change the model, obtain the revised data and understand the immediate ramifications of any parameter change on the model.
Often, there is a disconnect between the practical applications taught in the classroom and the applications students encounter in the real world. MapleSim bridges this gap, by allowing students to visualise and experiment with real world examples, such as the KUKA robot model, that expand on the knowledge gained in the classroom. “MapleSim really helped me learn how to best teach robotics to my students. It helped me understand how to explain robotics in a real world context,” said Dr. Carrasco. “Unlike control design, where mathematical manipulation is sometimes difficult to visualise, in robotic design, mathematical manipulation changes the movement of the robot. MapleSim makes it easy for the students to visualise any changes. In my opinion, MapleSim is simply the best software package available to teach the principles of robotics.”
The students in Dr. Carrasco’s second year Robotics class have benefited so much from MapleSim that Dr. Carrasco plans to begin using MapleSim for third year robotics students in the coming term. This user case study is part three in a series on the use of Maplesoft products at the University of Manchester.

Featured products

MAX17793
Analog Devices Inc.

3V to 80V, 3A, High-Efficiency, Synchronous Step-Down DC-DC Converter
| SKU: | MAX17793 |
|---|---|
| Stock: | 9316 |
| Cost: | $3.64 |

MAX22516
Analog Devices Inc.

IO-Link Data Link Controller with Transceiver and Integrated DC-DC
| SKU: | MAX22516 |
|---|---|
| Stock: | 8000 |
| Cost: | $5.42 |
Product Spotlight
102991834
BeagleBoard

Single Board Computer (SBC), BeagleY-AI
AM67A BeagleY-AI Jacinto 7 AR...
| SKU: | 2820-102991834-ND |
|---|---|
| Stock: | 208 |
| Cost: | $56.24 |
SC1110
Raspberry Pi

Raspberry Pi 5 2GB
The Raspberry Pi 5 2GB model represents a leap for...
| SKU: | 2648-SC1110-ND |
|---|---|
| Stock: | 0 |
| Cost: | $38.33 |
AKX00069
Arduino

Arduino Plug and Make Kit
The Arduino Plug and Make Kit features the ...
| SKU: | |
|---|---|
| Stock: | 968 |
| Cost: | $66.97 |
300361-0011
Molex

MX150 Mid-Voltage MatSealed Female Connector Assembly, Dual Row, 20 Circ...
| SKU: | |
|---|---|
| Stock: | 280 |
| Cost: | $2.51 |