
Bringing communications to the factory floor
Communication continues to grow rapidly in the field of industrial and factory automation, as manufacturers seek to improve the capability, efficiency and flexibility of their systems and infrastructure.
By Knut Dettmer, Principal Engineer, Smart Factory Marketing, Renesas Electronics Europe.
Real-time network communication for distributed processing in industrial and factory automation systems is an integral part of many systems such as gateways, I/O controllers, PLCs, industrial drives and countless other networked applications. Many diverse protocols and open networks are used such as EtherCAT, CC-Link/CC-Link IE, EtherNet/IP, PROFINET, CANopen, DeviceNet and many others, which ideally need to be supported from a single device or family. Operation of each of these protocols requires the protocol stack software, an RTOS, Ethernet and other open network drivers plus interfaces to the application system. While not all of these protocols are necessarily used at once in the same application, a key factor in the choice of products is that all of the required infrastructure can to be supported on the chosen technology, allowing a common system design to serve a diversity of networks and applications.
In a conventionally structured system where much of the RTOS and network communications are implemented in middleware, a high processing demand is needed to be able to perform all of the control, communication and application tasks in order to provide the real-time responses demanded by the system. This not only requires high performance CPUs and large amounts of memory, but also industrial Ethernet based network functions and open protocols such as CAN. When these functions are implemented in software (middleware) it can impact the system performance and responsiveness causing longer system latency and jitter between real-time task operations combined with higher power consumption due to longer processing times. The hardware impact is no less considerable if many of the protocol functions and physical interfaces are not included in the devices. Increased system costs often results by having to employ higher performance CPU products to achieve the target system performance and larger PCB area to accommodate all of the necessary hardware.
The challenge is to implement and improve the operation of all of these key areas, while still reducing the overall power consumption and system costs. Given the tough requirements described above, the concept of the R-IN32M3 ICs was conceived where the product design was characterised by three main goals: achieve the highest possible level of integration; implement timing critical and processing intensive tasks in hardware, and; support all major industrial Ethernet standards. Thus the R-IN32M3 family of highly integrated high performance products for Industrial and Factory Automation was born. The R-IN32M3 is targeted for use in networked applications such as small PLCs and Slave network functions such as sensors, inverters, robots and servos.
Design goals
To achieve the design goals, the R-IN32M3 is based on a 100MHz ARM Cortex M3 RISC CPU core, 1.3MB internal SRAM, a large selection of standard peripherals such as Serial Flash interface, UART, I2C and CSI, Timers, Watchdog, external parallel MPU interface and a high number of general I/O ports. The advanced on-chip features include HardWare engines for the Real-Time Operating System accelerator (HW-RTOS) and Ethernet Accelerator, a two port Gigabit Ethernet Switch and specific network controllers for CC-Link/CC-Link IE (field controller), EtherCAT (slave controller) and ISO11898 CANopen/DeviceNet open network interfaces. The R-IN32M3-EC variant also includes an on-chip two port Ethernet PHY.
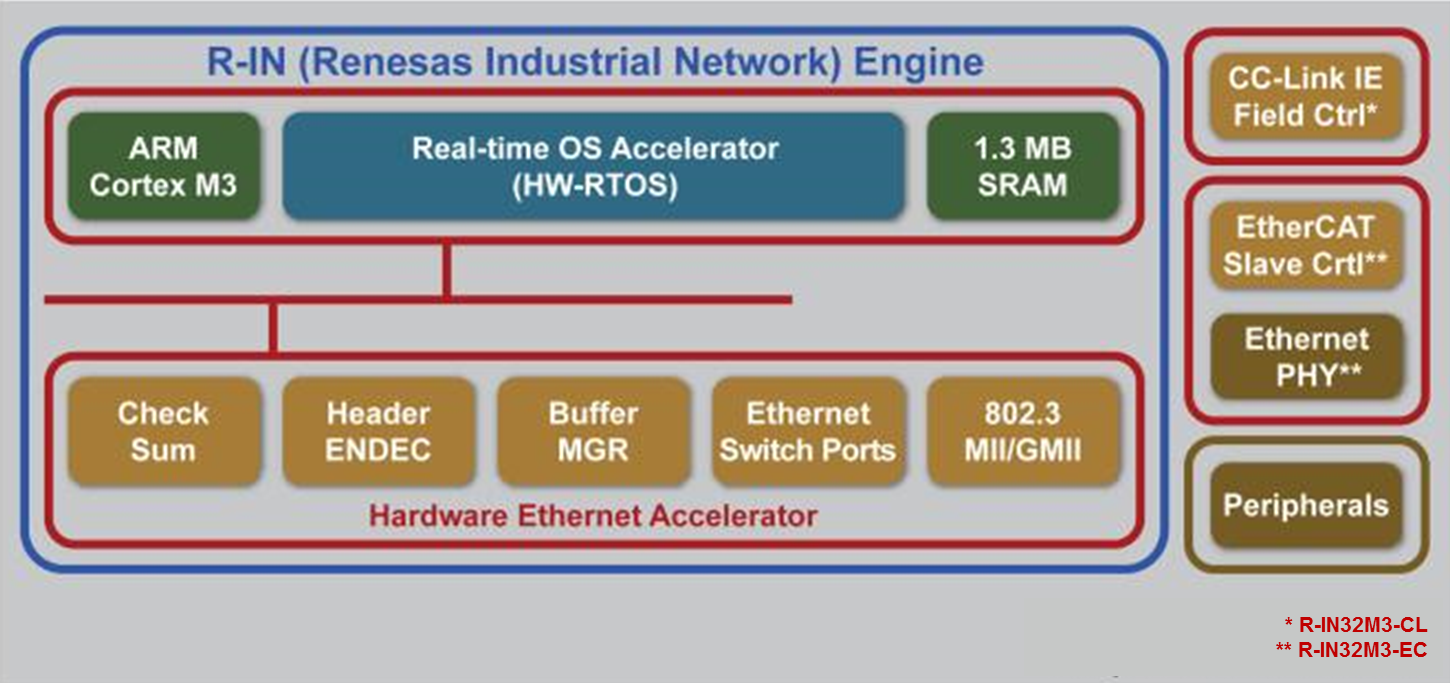
Figure 1 - The R-IN32M3 Architecture
Two devices are currently available the R-IN32M3-EC supporting EtherCAT and the R-IN32M3-CL supporting CC-Link IE with dedicated hardware modules. Software based protocols like PROFINET, EtherNet/IP or Modbus TCP are enabled by the on-chip three port switch and are executed on the CPU. Figure 1 shows how the highly integrated R-IN32M3 contains some innovative advanced hardware functions such as the hardware RTOS and Ethernet accelerators. The hardware RTOS accelerator delivers major system improvements reducing latency and jitter, plus lower CPU loading allowing tasks and application specific operation to be performed more efficiently. For example interrupt latency is improved by up to eight times and context (task) switches by up to three times delivering an overall five times improvement when compared to comparable software based RTOS systems. Thus more application specific tasks can be managed, or the system run at a lower clock frequency to save power.
The HW-RTOS implements all of the necessary RTOS functions such as synchronisation and communication, task scheduling and status, time management and hardware interrupt service routines. Like the HW-RTOS accelerator, the Ethernet accelerator also provides a significant reduction in the CPU overhead to process the Ethernet protocols and frames such as used in TCP/IP and UDP communication. As can be seen in Figure 2, the dramatic reduction in CPU processing time allows significantly more time for task and application specific operations, or the ability for the device to be run at a lower clock frequency, thus providing additional power reduction possibilities. Alternatively CPU loading can be traded in order to achieve higher communication speeds, for example typically 100Mb/s communication rates can be achieved with only a 31% CPU loading, whereas with a 100% CPU load can achieve rates around 300Mb/s. (Figures based on a UDP communication protocol).
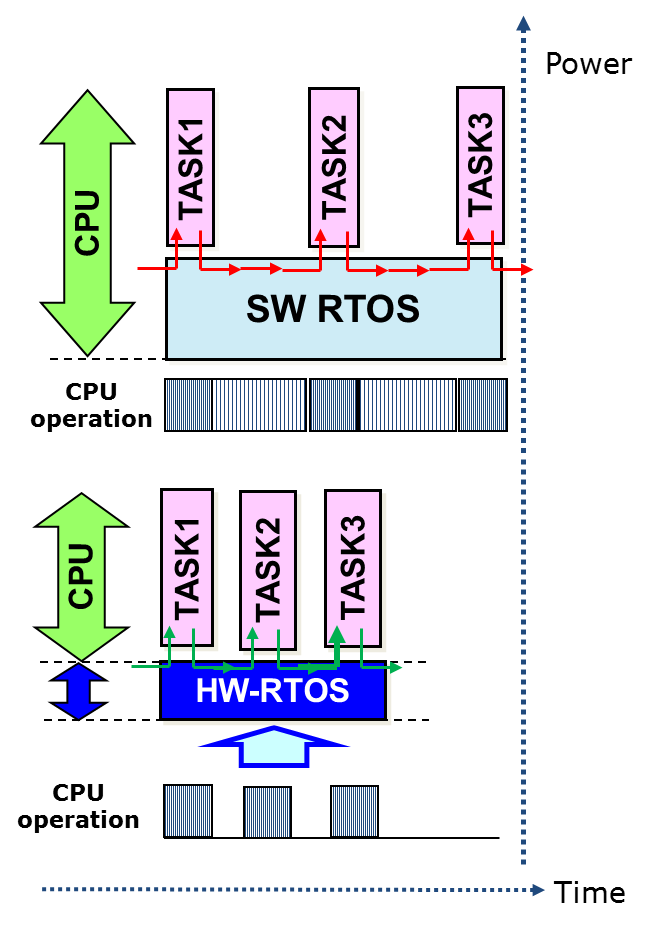
Figure 2 - The hardware-based RTOS accelerator was designed to deliver major improvements in latency and jitter
On-chip acceleration
When the above hardware accelerators are combined with the dedicated on-chip protocol interfaces (EtherCAT, CC Link/CC Link-IE) the R-IN32M3 is able to deliver a compact system design offering significant improvements in system latency and response times (i.e. Jitter) giving much improved and stable real-time processing, especially for those time critical networked applications such as servo and other motor control based factory applications. Power reduction can also be achieved without compromising the system performance with the core achieving less than 150mW in a typical control system, a 50% improvement over existing ‘best in class’ designs and still providing the user with flexible design options depending upon the requirements of the application.
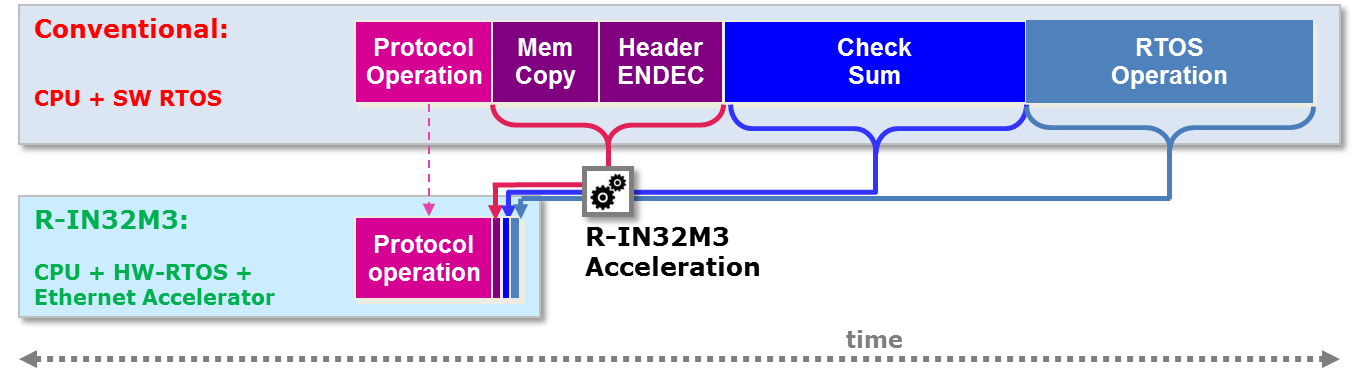
Figure 3 - The hardware accelerator provides unmatched Ethernet frame processing allowing a flexible system design with either faster communication speeds or more time available for tasks and application execution, together with reduced power consumption
The Cortex-M3 CPU core provides a range of on-chip debugging options, including program download, execution, break and trace output of program execution data using either JTAG or the dedicated serial debug ports. Recommended emulation tools are available from Segger, IAR Systems and Yokogawa, while boundary scan is also available for in-circuit PCB testing.
Starter kits for evaluation or developing software for the R-IN32M3 family range from the full Renesas Electronics starter kits for the R-IN32M3-EC and R-IN32M3-CL to 'lite' starter kits such as the ‘Connect it! Ethernet R-IN’ kit from IAR (including time limited compiler). The Renesas R-IN32M3 starter kit include a full featured evaluation board providing an off the shelf hardware reference platform allowing the user to quickly start evaluating, developing and testing network communications and application specific software. The kit comes with a complete package of ready to use software such as Real Time OS, TCP/IP stack, protocol software and application software examples. The kit includes a Segger J-Link light debugger. In addition an extensive technology partner network is available to provide compilers and debuggers from IAR and Segger and software such as CANopen, CC-Link, CC-Link IE, PROFINET, EtherNet/IP, EtherCAT stacks from port, TMG, Vector, ESD, Mitsubishi and Beckhoff/ETG.
Modern industrial applications require deterministic high-speed real-time responses, ever lower power consumption and high performance communication. A family of highly integrated multi-protocol devices has been designed to meet these demands by including the necessary protocols in hardware together with innovative hardware acceleration engines necessary to provide low power and high performance communications for real-time factory floor applications.

Featured products

MAX17793
Analog Devices Inc.

3V to 80V, 3A, High-Efficiency, Synchronous Step-Down DC-DC Converter
| SKU: | MAX17793 |
|---|---|
| Stock: | 9316 |
| Cost: | $3.64 |

MAX22516
Analog Devices Inc.

IO-Link Data Link Controller with Transceiver and Integrated DC-DC
| SKU: | MAX22516 |
|---|---|
| Stock: | 8000 |
| Cost: | $5.42 |
Product Spotlight
102991834
BeagleBoard

Single Board Computer (SBC), BeagleY-AI
AM67A BeagleY-AI Jacinto 7 AR...
| SKU: | 2820-102991834-ND |
|---|---|
| Stock: | 208 |
| Cost: | $56.24 |
SC1110
Raspberry Pi

Raspberry Pi 5 2GB
The Raspberry Pi 5 2GB model represents a leap for...
| SKU: | 2648-SC1110-ND |
|---|---|
| Stock: | 0 |
| Cost: | $38.33 |
AKX00069
Arduino

Arduino Plug and Make Kit
The Arduino Plug and Make Kit features the ...
| SKU: | |
|---|---|
| Stock: | 968 |
| Cost: | $66.97 |
300361-0011
Molex

MX150 Mid-Voltage MatSealed Female Connector Assembly, Dual Row, 20 Circ...
| SKU: | |
|---|---|
| Stock: | 280 |
| Cost: | $2.51 |