
Achieving precise real-time geolocation for automotive applications
In only a few years, our society has become dependent on global navigation satellite systems (GNSS). We use it in our cars to find our way around, on our phones when we’re walking through an unfamiliar city, and in countless other navigation applications.
Satellite position data is also an essential part of tracking and logistics systems as well as enabling autonomous or semi-autonomous motion of agricultural and industrial vehicles and robots.
Here, Mark Patrick, Mouser Electronics discusses the importance of achieving accurate, real-time geolocation for automotive applications.
While the first in-car navigation applications were around in the 1980s, it was only as recently as May 2000 that the USA ended its use of ‘selective availability’, which had deliberately degraded the accuracy of its Global Positioning System (GPS) system for civilian users. With precision improved by a factor of up to ten, literally overnight, there was a boom in the uptake of GPS systems.
Today, we are on the brink of extending our dependence on satellite navigation even further. Autonomous vehicles are set for widespread adoption at some point in the near future, although the timing of this is still far from clear. They depend on GNSS to know their position, which direction they are moving, and their speed, all to a high degree of accuracy. While fully self-driving cars are still at the prototype stage, current driver assistance features such as lane changing also need precise location data.
But what happens when the vehicle enters a long tunnel, a multi-story car park, or simply an ‘urban canyon’ between tall buildings? Without a direct view of the navigation satellites, the autonomous vehicle loses the precise geolocation it needs to function.
The challenges of satellite navigation
To understand the areas where satellite navigation struggles, let's remind ourselves of how it works: Basically, a GNSS receiver (like those typically in cars and smartphones) picks up signals from the GNSS satellites, such as the 31 GPS satellites that orbit at an altitude of about 20,200km. Other main GNSS systems in use include Russia’s GLONASS, China’s BeiDou, and the European Union’s Galileo.
GPS satellites carry extremely accurate atomic clocks and continuously broadcast a signal that includes the current time. A receiver can compare the timestamp on a transmission with the actual time when the transmission is received, and thus calculate its distance from the satellite (when the signal was sent).
By comparing the signals from four or more satellites, a receiver can determine its position with an accuracy of about 7 metres, 95% of the time. This level of accuracy does require a complex set of calculations that account for other factors, such as the influence of weather on the signals.
But as mentioned earlier, the satellite signals can be blocked by anything that gets in the way of a direct line of sight. This could be tall buildings, bridges, tunnels, or multi-storey car parks. In fact, these signal-blocking problems are often likely to occur just when an up-to-date, precise position is needed, such as when exiting a car park or a tunnel.
Another problem in built-up locations is multipath reception. The GNSS signals are reflected off buildings, so the receiver picks up indirect signals, thus resulting in poor signal integrity and decreasing accuracy. GNSS signals may also be jammed or spoofed. Jamming refers to the generation of interference across GNSS frequencies by an external source, resulting in the loss of positional information by the receiver. The act of spoofing involves the intentional transmission of counterfeit GNSS signals, with the intent to disrupt receivers and mislead users by broadcasting false location information. The techniques were originally developed for military applications. Nevertheless, they have now become tools used by some members of the public and criminal organisations to interfere with location services. Using an external antenna with the receiver can boost the relatively weak GNSS signals, but in many cars, this will not be the preferred option.
The fundamental problem is that satellite navigation systems rely on the positional data from a GNSS system, which is not always guaranteed to be available, particularly where the signal is interrupted. This may be an inconvenience for a human driver, but a disaster for an autonomous vehicle.
How can we achieve precise real-time navigation, overcoming the limitations of GNSS-based systems? The answer is dead reckoning capabilities, which use information from motion sensors and wheel rotation data to fill in the gaps in GNSS.
Dead reckoning fundamentals
Dead reckoning is a navigation technique that has been used for centuries – back when ships used a compass to find their direction and a log thrown overboard to track how far they had moved. It may be old, but it’s a method that can be used to improve the accuracy of the most up-to-date GNSS systems.
To use dead reckoning, the navigation system needs to know its acceleration and speed, which it can then combine with GNSS data to calculate a more accurate position, or to continue to map a vehicle’s progress from its last known GNSS-derived location.
To obtain this motion data, dead reckoning systems use gyroscopes and accelerometers, typically combined in an inertial measurement unit (IMU). An ‘untethered’ dead reckoning (UDR) system relies on this inertial data, while an ‘automotive dead reckoning’ (ADR) solution adds in data from the vehicle’s wheel ‘tick sensor’, which measures the rotation of the wheels, enabling the system to calculate distance travelled and speed.
A modern car is likely to already be gathering wheel rotation data for other purposes, such as electronic stability control. This means that the navigation system can typically just read this data from the automotive CAN bus.
Overall, ADR is likely to provide a more accurate solution, particularly when GNSS data is absent for periods of a minute or more. On the other hand, it is a more expensive option than UDR, so the choice between the two should be made on a case-by-case basis.
Combining GNSS and dead reckoning
Now that we have introduced the fundamental concepts, let’s look in more detail at UDR, ADR, and some commercially available solutions.
An example of a UDR module is the NEO-M8U (Figure 1) from u-blox. This provides continuous navigation without requiring speed information from the vehicle and is thus a self-contained solution; it is independent of any electrical connection to the car, except power.
Figure 1: u-blox's NEO-M8U (Source: Mouser Electronics).
The NEO-M8U includes u-blox's latest generation GNSS receiver and provides high sensitivity and fast GNSS signal acquisition and tracking. It can handle GNSS signals from the Galileo, GPS, GLONASS, and BeiDou constellations.
To provide UDR capabilities, the module integrates 3D accelerometer and gyroscope sensors into a single package. It uses intelligent algorithms to combine this IMU data with GNSS data to obtain position information and has a real-time positioning update rate of up to 30Hz. For flexible connectivity and simple integration, the module provides UART, USB, DDC (I²C-compliant), and SPI interface options.
As well as GNSS and dead reckoning, the module supports satellite-based augmentation systems (SBAS). SBAS supplement GPS data with additional GPS augmentation data, which can be used by GNSS receivers to improve precision and availability. Examples include the regional Quasi-Zenith Satellite System (QZSS) covering Japan and Australia.
For ADR capabilities, u-blox’s most recent module is the NEO-M9V (Figure 2), available on the u-blox EVK-M9DR GNSS dead reckoning evaluation kit. This module offers both UDR and ADR, giving more flexibility to design engineers to choose UDR for easier integration, or ADR for its improved accuracy and sophisticated features.
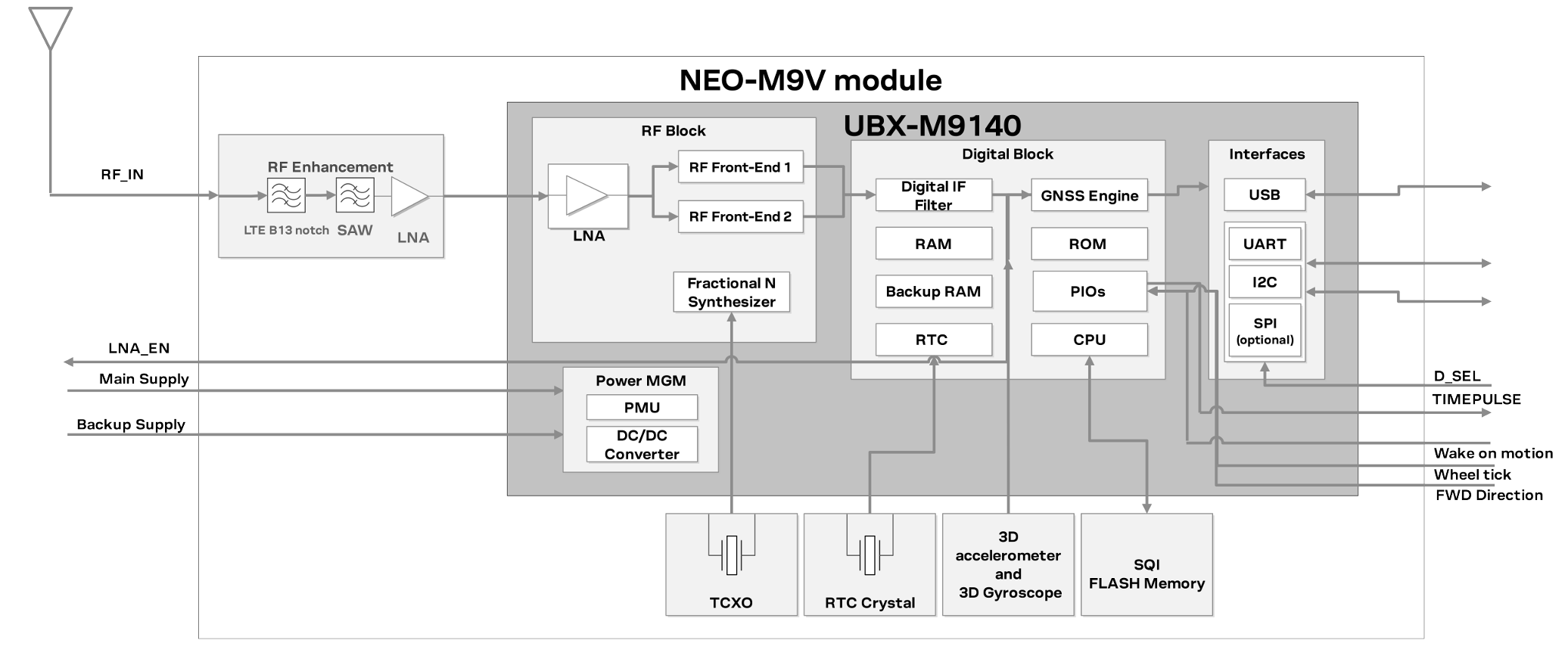
Figure 2: NEO-M9V block diagram (Source: u-blox)
The NEO-M9V provides robust GNSS positioning, with accuracy down to the metre level, and concurrent reception of up to four GNSS signals (GPS, GLONASS, BeiDou, and Galileo). This maximises the number of satellites visible and usable, thus improving position accuracy. It also provides SBAS and QZSS reception to enable GNSS augmentation features.
As with the NEO-M8U, the NEO-M9V includes 3D inertial sensors, with an integrated 6-axis IMU. It can also take speed data from the vehicle’s wheel tick sensor, either directly from the sensor or as messages via a serial interface.
Both u-blox modules use GNSS chips qualified according to the automotive AEC-Q100 standard.
Conclusions
By fusing together multiple sensors and GNSS data, designers can achieve accurate real-time geolocation for vehicles. This makes it possible to cope with gaps in the GNSS signal, such as from urban canyons and tunnels, and to deliver the accuracy needed for autonomous vehicles.
To meet a variety of requirements, u-blox has developed a range of GNSS modules that include IMU sensors. For example, the NEO-M9V delivers three times better accuracy than GNSS-only receivers, enabling a smooth navigation experience even in crowded cities.
As we increasingly rely on driver assistance systems and see the introduction of fully autonomous cars on the horizon, adding dead reckoning to GNSS systems will meet the challenges of precise, uninterrupted navigation data.

Featured products

MAX17793
Analog Devices Inc.

3V to 80V, 3A, High-Efficiency, Synchronous Step-Down DC-DC Converter
| SKU: | MAX17793 |
|---|---|
| Stock: | 9316 |
| Cost: | $3.64 |

MAX22516
Analog Devices Inc.

IO-Link Data Link Controller with Transceiver and Integrated DC-DC
| SKU: | MAX22516 |
|---|---|
| Stock: | 8000 |
| Cost: | $5.42 |
Product Spotlight
102991834
BeagleBoard

Single Board Computer (SBC), BeagleY-AI
AM67A BeagleY-AI Jacinto 7 AR...
| SKU: | 2820-102991834-ND |
|---|---|
| Stock: | 171 |
| Cost: | $56.92 |
SC1110
Raspberry Pi

Raspberry Pi 5 2GB
The Raspberry Pi 5 2GB model represents a leap for...
| SKU: | 2648-SC1110-ND |
|---|---|
| Stock: | 83 |
| Cost: | $38.33 |
AKX00069
Arduino

Arduino Plug and Make Kit
The Arduino Plug and Make Kit features the ...
| SKU: | |
|---|---|
| Stock: | 892 |
| Cost: | $66.97 |
300361-0011
Molex

MX150 Mid-Voltage MatSealed Female Connector Assembly, Dual Row, 20 Circ...
| SKU: | |
|---|---|
| Stock: | 280 |
| Cost: | $2.51 |